Machine Tool
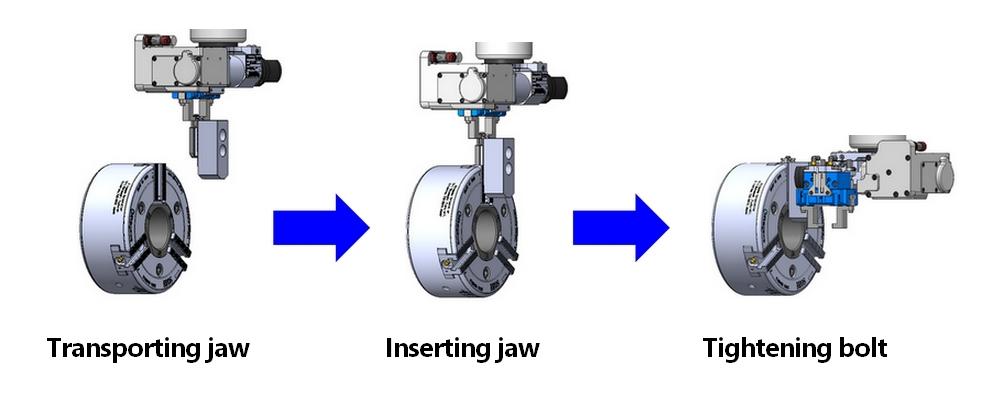
This video introduces the features of BR-AJC_E.
| Model | BR-AJC06E | BR-AJC08E | BR-AJC10E | |
|---|---|---|---|---|
| Dimensions | Length (mm) | 265 | ||
| Height (mm) | 140 | |||
| Width (mm) | 139 | |||
| Mass (kg) | 5.5 | |||
| Tightening torque (Nm) | 47 | 80 | 107 | |
| Applicable chuck | BR06 / BRT06 | BR08 / BRT08 | BR10 / BRT10 | |
| Applicable soft jaws ※Allowable jaw height: 56 mm |
SJ06B1 |
SJ08B1 SJ08S1 SJ08A1 SJ08A1-056 SJ08A1T056 |
SJ10B1 SJ10S1 SJ10A1 SJ10A1-056 |
|
※Please machine the jaw so that the maximum jaw height is 56mm or less.
| START | Air supply | OFF= Stop、ON= Rotation | |
|---|---|---|---|
| Load | Solenoid valve (DC24V/50mA or more) | ||
| DIR | Rotating direction | OFF= Right rotation (tightening)、ON= Left rotation (Loosening) | |
| Load | Solenoid valve (DC24V/50mA or more) | ||
| LOW | OFF= Tightening・Loosening、ON= Slow reverse rotation | ||
| Load | Photocoupler (DC24V/20mA or more) | ||
| Control signal input | STOP | Stop | ON= Set torque reached or error detected |
| Output | Open collector (DC24V/30mA or less) | ||
| ERR | Error | ON= Error detected Condition for turning ON ・Insufficient torque during tightening : Timeout of tightening timer (10 sec) ・Limit torque reached during loosening : Reach 160Nm ・Overtorque : More than 20Nm above the set torque |
|
| Output | Open collector (DC24V/30mA or less) | ||
| Power source | DC24V/10W or more | ||
| Adjustable torque range | Tightening : 20~150Nm Loosening : 160Nm |
||
| Indicator lamp | Green: Synchronize with START signal and turn on | ||
| Red : Synchronize with ERR signal and turn on | |||
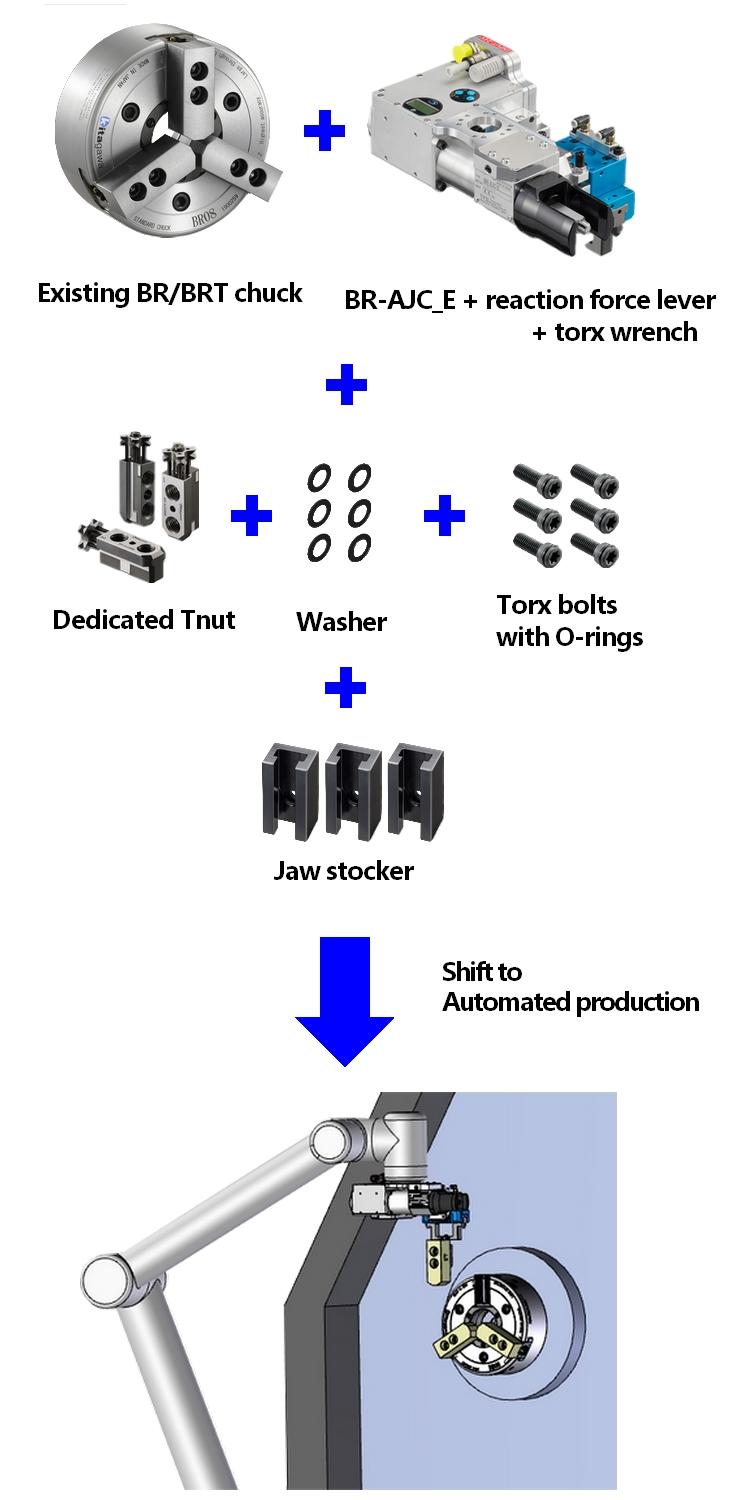
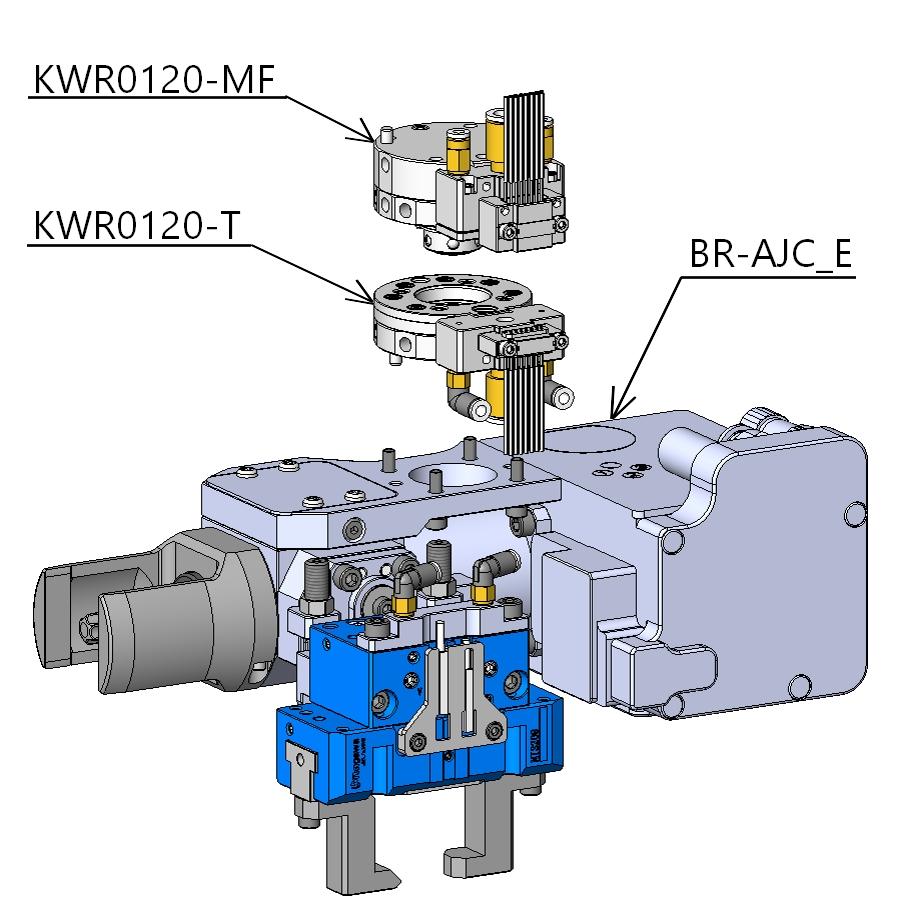
| Main unit | Reactoion |
Washer | Jaw stocker |
||||
|---|---|---|---|---|---|---|---|
|
BR-AJC-E and |
|||||||
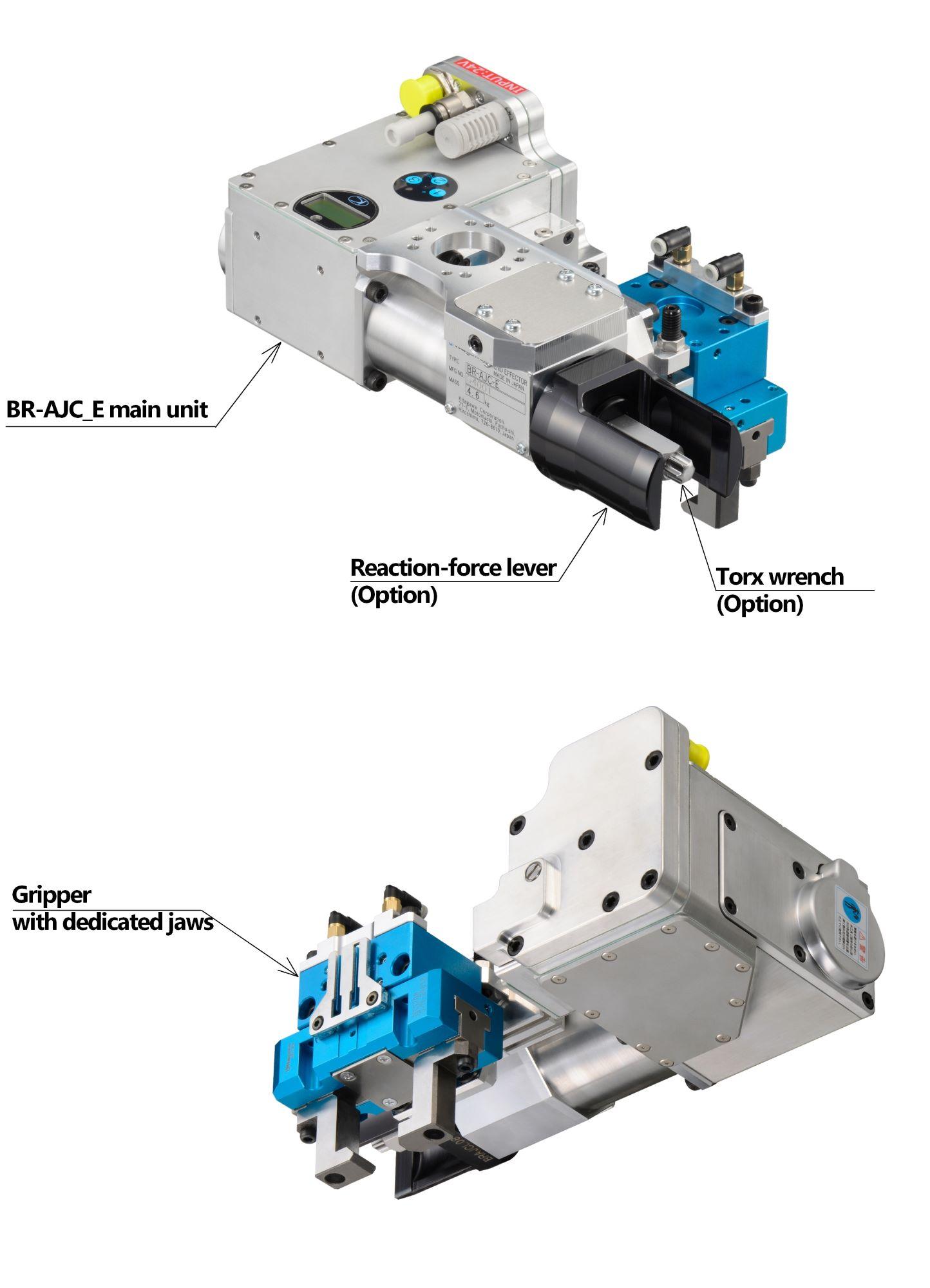
Main unit (with reaction force lever and torx wrench)
| Model | BR-AJC06E | BR-AJC08E | BR-AJC10E | |
|---|---|---|---|---|
| 2D |  |
|
|
|
| TIF |  |
|
|
|
| DXF |  |
|
|
|
| DWG |  |
|
|
|
| 3D | Parasolid |  |
|
|
| STEP |  |
|
|
|
Dedicated T-nut
| Model | BR-AJC06M | BR-AJC08M | BR-AJC10M | |
|---|---|---|---|---|
| 2D | |
|
|
|
| TIF | |
|
|
|
| DXF | |
|
|
|
| DWG | |
|
|
|
| 3D | Parasolid | |
|
|
| STEP | |
|
|
|
Washer
| Model | BRAJCWS10 | BRAJCWS12 | |
|---|---|---|---|
| 2D | |
|
|
| TIF | |
|
|
| DXF | |
|
|
| DWG | |
|
|
| 3D | Parasolid | |
|
| STEP | |
|
|
Torx bolt with O-ring
| Model | BRAJCBT10 | BRAJCBT12 | |
|---|---|---|---|
| 2D | |
|
|
| TIF | |
|
|
| DXF | |
|
|
| DWG | |
|
|
| 3D | Parasolid | |
|
| STEP | |
|
|
Jaw stocker
| Model | BR-AJC06S | BR-AJC08S | BR-AJC10S | |
|---|---|---|---|---|
| 2D | |
|
|
|
| TIF | |
|
|
|
| DXF | |
|
|
|
| DWG | |
|
|
|
| 3D | Parasolid | |
|
|
| STEP | |
|
|
|

Wide variety of world’s standard power chuck

High gripping force & stability to suit various requirements

Necessary item for Quality control and Safety

Standard Manual Chucks suit to a high-mixture of work pieces and low-volume production.

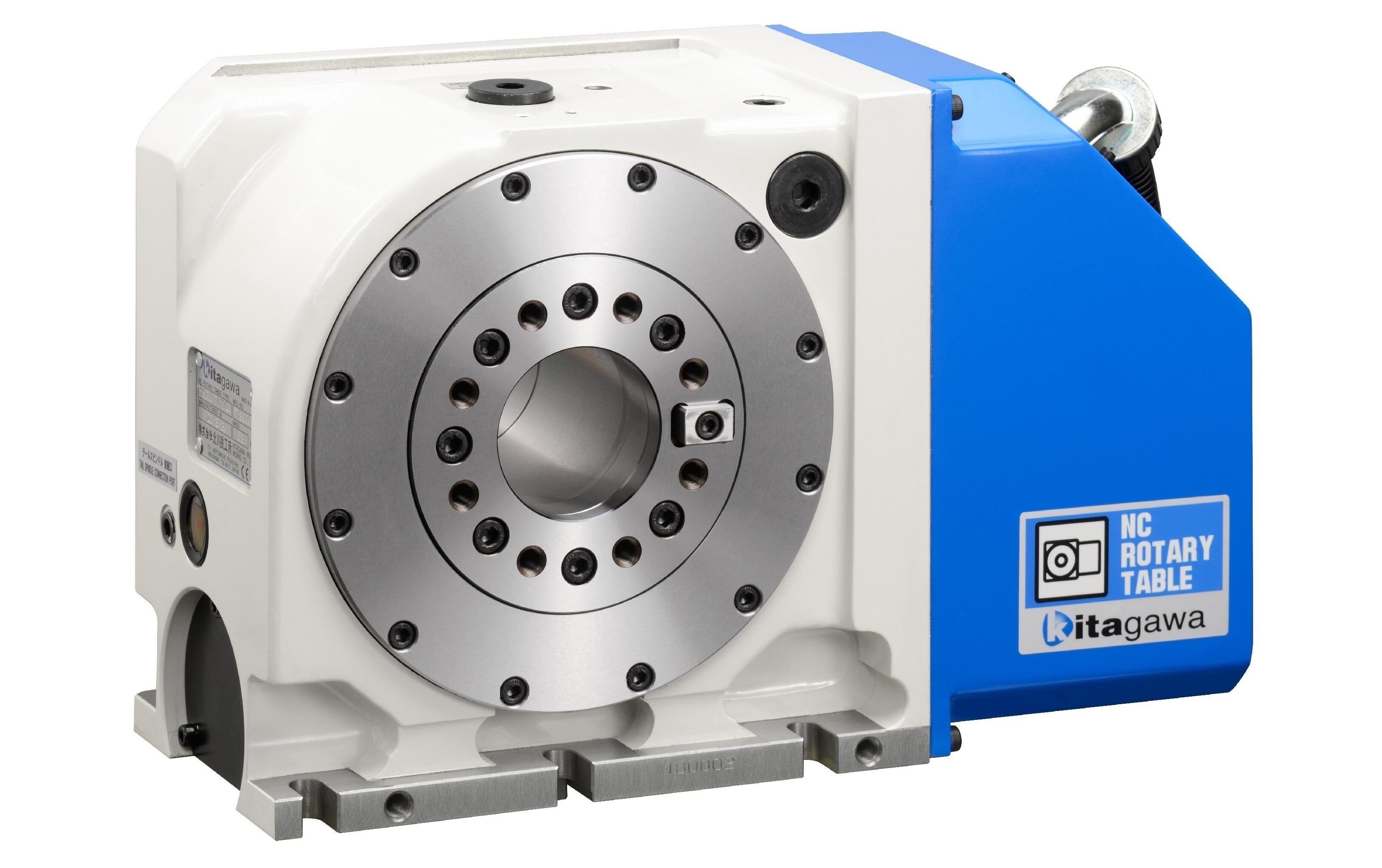
High performance Rotary Cylinder is integral to for the operation of a power chuck and extracts the maximum capability of the chuck.
Compact & high accuracy Combination with chuck is available.

Toggle joint mechanism Long jaw stroke

Stationary power chuck with built-in cylinder


Tail stocks, tail spindles, rotary joints, rotary chucks and others


Kitagawa's original grippers with high-quality and high-durability
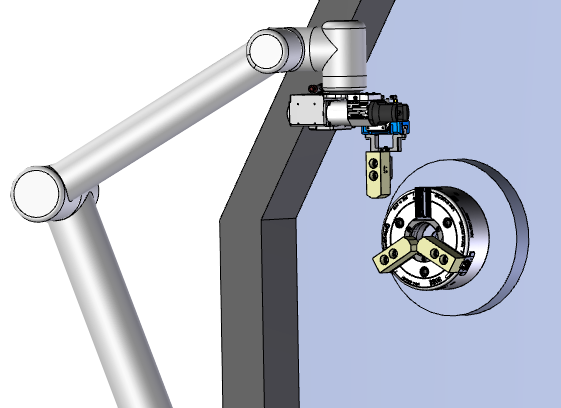
Strongly support factory automation and unmanned operation

Various catalogues can be downloaded.

Various flyers can be downloaded

Information on discontinued products is posted.