Robot hand

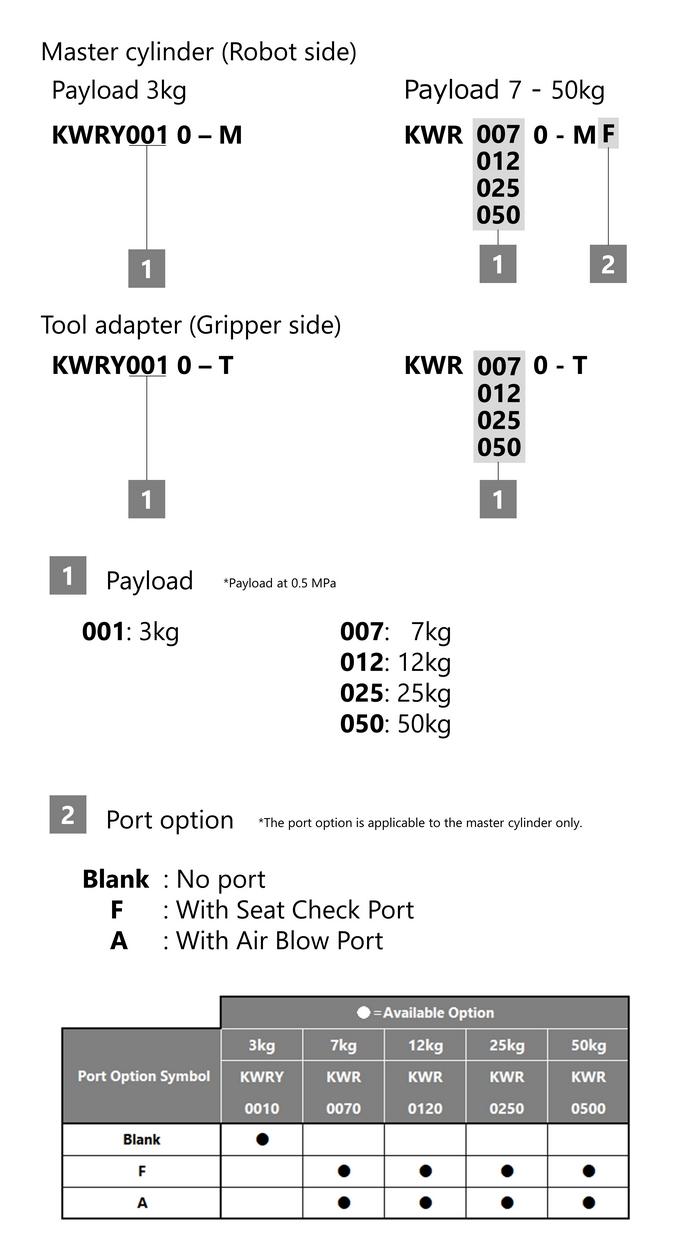
| Model | KWRY0010 | KWR0070 | KWR0120 | KWR0250 | KWR0500 | ||
|---|---|---|---|---|---|---|---|
| Payload*1 | at 0.5MPa | kg | 3 | 7 | 12 | 25 | 50 |
| at 1MPa | kg | 6 | 12 | 20 | 45 | 90 | |
| Repeatability | mm | 0.003 | |||||
| Lift stroke (Detaching stroke) | mm | 0.8 | 0.8 | 0.8 | 1.0 | 1.0 | |
| Cylinder capacity | Lock | cm3 | 0.64 | 1.50 | 2.38 | 6.08 | 14.38 |
| Release | cm3 | 0.72 | 1.72 | 2.69 | 6.68 | 15.39 | |
| Operationg air pressure | Max. pressure | MPa | 1.0 | 1.0 | |||
| Min. pressure | MPa | 0.4 | 0.35 | ||||
| Withholding pressure | MPa | 1.5 | 1.5 | ||||
| Holding force | at 0MPa*2 | kN | 0.12 | 0.15 | 0.32 | 0.57 | 0.95 |
| at 0.35MPa | kN | - | 0.68 | 1.14 | 2.31 | 4.44 | |
| at 0.4MPa | kN | 0.45 | 0.75 | 1.26 | 2.56 | 4.94 | |
| at 0.5MPa | kN | 0.50 | 0.90 | 1.50 | 3.05 | 5.94 | |
| at 1MPa | kN | 0.90 | 1.64 | 2.67 | 5.53 | 10.92 | |
| Lifting force (Detaching force) |
at 0.35MPa | kN | 0.03 (at 0.4MPa) |
0.11 | 0.16 | 0.38 | 0.77 |
| at 0.5MPa | kN | 0.08 | 0.20 | 0.30 | 0.68 | 1.34 | |
| at 1MPa | kN | 0.23 | 0.51 | 0.78 | 1.66 | 3.27 | |
| Allowable static moment*1 | Bending (at 0.5MPa) | N・m | 5 | 14 | 27 | 74 | 194 |
| Bending (at 1.0MPa) | N・m | (10) | (25) | (45) | (135) | (350) | |
| Twisting | N・m | 12 | 23 | 45 | 100 | 175 | |
| Max. load moment*3 | Bending (at 0.5MPa) | N・m | 10 | 28 | 54 | 148 | 388 |
| Bending (at 1.0MPa) | N・m | (20) | (50) | (90) | (270) | (700) | |
| Twisting | N・m | 24 | 46 | 90 | 200 | 350 | |
| Operating temperature | ℃ | 0 ~ 70 | |||||
| Usable fluid | Dry air | ||||||
| Mass*4 | Master cylinder | g | 85 | 180 | 250 | 500 | 1000 |
| Tool adapter | g | 60 | 120 | 160 | 300 | 750 | |
| Number of air ports | Thread size x number of ports | M3 x 6 ports | M5 x 6 ports | M5 x 6 ports | M5 x 6 ports | M5 x 2 ports Rc1/8 x 4 ports |
|
*1 Please consider both the payload and allowable static moment when selecting the product.
*2 It indicates holding force when air pressure becomes 0MPa after connecting and may not meet the specification.
*3 The product must be used within Allowable Static Moment. Using at Max. Load Moment will not meet the specifications.
*4 The mass of product is without options.




Wide variety of world’s standard power chuck

High gripping force & stability to suit various requirements

Standard Manual Chucks suit to a high-mixture of work pieces and low-volume production.


Necessary item for Quality control and Safety

High performance Rotary Cylinder is integral to for the operation of a power chuck and extracts the maximum capability of the chuck.
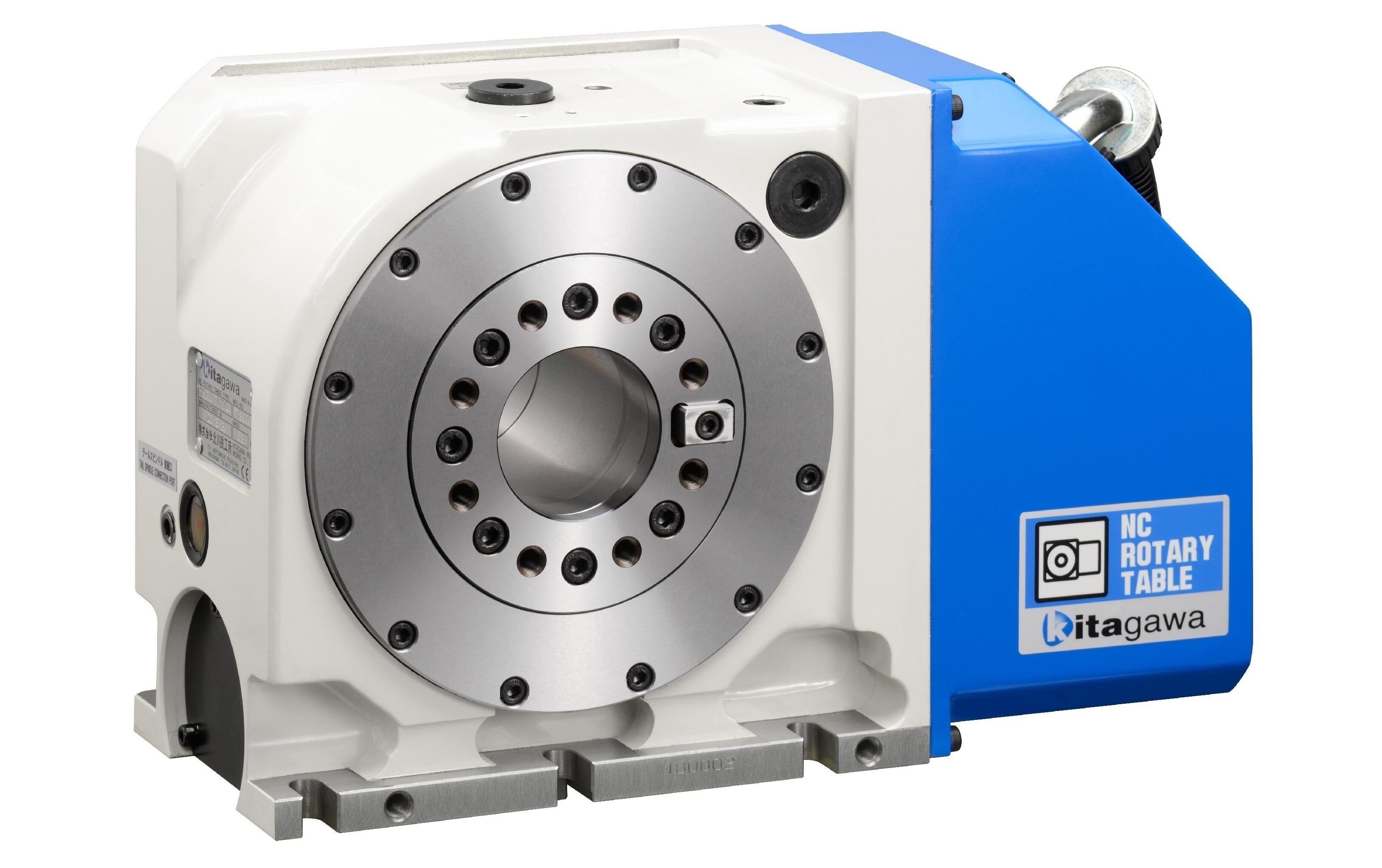
Compact & high accuracy Combination with chuck is available.

Tail stocks, tail spindles, rotary joints, rotary chucks, Dedicated controller and others

Toggle joint mechanism Long jaw stroke


Stationary power chuck with built-in cylinder

Kitagawa's original grippers with high-quality and high-durability
Strongly support factory automation and unmanned operation

Various catalogues can be downloaded.

Various flyers can be downloaded

Information on discontinued products is posted.